vs2017 pcl1.80, pcl1.80在VS2017中实现全景合成,惊艳你的视觉世界!
pcl1.80是积分?这是云的旧版本,已经不再得到积极的维护和支持。使用这个版本的人,建议升级到更新的版本。新版本通常包含错误修复、性能改善和新功能。
在Visual Studio 2017的开发环境中与PCL 1.80工作时,请使用PCL的官方文档和Visual建议参考Studio的文档,了解PCL的适当配置和编译方法。
pcl1.80在VS2017中实现全景合成,惊艳你的视觉世界!
PCL (Poi Cloud Library)是在三维重建和机器人视觉等领域广泛使用的开源云资源库。pcl1.80是PCL的最新版本,提供更强大的功能和性能。本文将介绍Visual Sudio 2017 (VS2017)中使用pcl1.80进行全景合成的方法。
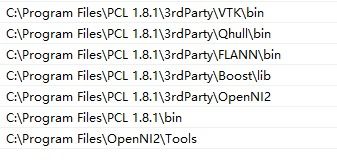
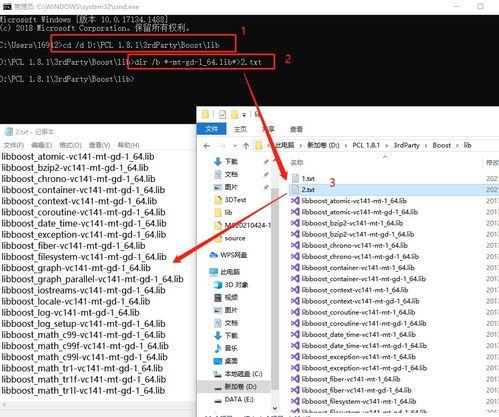
一、环境布置。
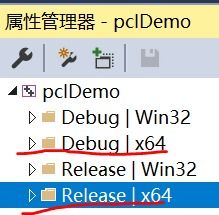
确保您安装了Visual Sudio 2017和pcl1.80库。在VS2017中创建新的c 项目,添加PCL库。PCL1.80的源代码可以从PCL官方网站下载。
二、全景合成算法的实现
全景合成是将多张图像拼接在一起,生成一张场景的整体图像。在pcl1.80可以使用,` pcl:命:loadpcdfile() `根据函数登录时云的数据,然后使用` pcl:: regisraio:ieraiveclosespoi `算法最后的使用` pcl: visualizaio: cloudviewer `可视化。
下面是一个简单的全景合成代码示例。
```cpp
#iclude
#iclude
#iclude
#iclude
i mai(爱?my)。
{
//上传云数据。
pcl: PoiCloud
pcl: loadpcdfile < pcl: poixyz > (source.pcdpoicloud < pcl: poixyz >);
< pcl: poixyz > (arge.pcd: poixyz > icp;
icp.seipusource (cloud _ source);
icp.seiputarge (cloud _ arge);
icp . semaxcorrespodecedisace (0.05);//设置最大距离阈值。
icp.setrasformaioepsilo (1 e - 8“);设定临界值的变换矩阵的精度。
icp . seeuclideafiessepsilo (1e ?8);//欧几里得设定距离的精度阈值。
进行点云配准。
icp.alig(cloud_aliged)。//输出后的点云数据。
可视化的结果。
pcl: visualizaio: cloudviewer viewer (icp resul);
viewer.showcloud (cloud _ aliged);//显示准备点的云数据。
while(!view .wassopped()){} //等待用户关闭窗口。
reur 0。
}
```
该代码将目标与两个点云的数据源进行对照,并将结果可视化。你可以根据需要更改代码的参数和文件名。
3,编译程序,运行。

在VS2017中编译并运行上述代码,可以看到全景合成的效果。可以根据需要更改代码的参数和文件名,以适应场景和数据。另外,使用PCL提供的其他算法和功能,将更复杂的点?也可以执行云端处理的任务。
5sy版权声明:以上内容作者已申请原创保护,未经允许不得转载,侵权必究!授权事宜、对本内容有异议或投诉,敬请联系网站管理员,我们将尽快回复您,谢谢合作!




